當(dāng)“全面量產(chǎn)無人車”成為熱門話題的時(shí)候,有這么一群人在默默地觀察,沒有緊鎖眉頭也沒有喜笑顏開,他們能夠看到別人看不見的問題,他們是無人車落地的關(guān)鍵,他們要保持冷靜。
這群深耕自動(dòng)駕駛領(lǐng)域的技術(shù)專家們,似乎更能淡定地對(duì)待外界對(duì)無人車的狂熱。自動(dòng)駕駛技術(shù)真的成熟了嗎?無人車離商業(yè)化落地到底還有多遠(yuǎn)?帶著這些問題,AI 前線對(duì)馭勢(shì)科技的多位技術(shù)專家進(jìn)行了獨(dú)家專訪。在熱度爆表的無人車話題下,我們想要冷靜地談?wù)劶夹g(shù)。
更多優(yōu)質(zhì)內(nèi)容請(qǐng)關(guān)注微信公眾號(hào)“AI 前線”(ID:ai-front)
雖然自動(dòng)駕駛的話題炒得火熱,但是相信有不少人對(duì)無人車的結(jié)構(gòu)并不了解。
馭勢(shì)科技的黃波博士告訴 AI 前線:一臺(tái)成熟的具備自動(dòng)駕駛功能的汽車需要具備三大核心子系統(tǒng):感知子系統(tǒng)、規(guī)劃決策子系統(tǒng)、執(zhí)行器子系統(tǒng)。三個(gè)核心子系統(tǒng)互相緊密配合、缺一不可,如此才能實(shí)現(xiàn)可靠、安全的自動(dòng)駕駛功能。
詳細(xì)來說,執(zhí)行器子系統(tǒng)是汽車執(zhí)行自動(dòng)駕駛動(dòng)作的基礎(chǔ),更貼近傳統(tǒng)汽車產(chǎn)業(yè),包括線控轉(zhuǎn)向、線控驅(qū)動(dòng)、線控剎車、線控車身控制等等,行業(yè)重點(diǎn)是升級(jí)成安全可靠新一代線控系統(tǒng)。
以馭勢(shì)科技為例,馭勢(shì) U-Drive™智能駕駛系統(tǒng)集成了規(guī)劃決策子系統(tǒng)的全部軟硬件載體,包括多層面的規(guī)劃算法及其 AI 硬件、多層面的控制算法及其實(shí)時(shí)計(jì)算軟硬件。它還集成了傳感器接入、感知處理算法和 AI 算法計(jì)算平臺(tái),能夠接入并且分析感知多攝像頭、多激光雷達(dá)、多毫米波雷達(dá)、多超聲波。
馭勢(shì)科技 CEO 吳甘沙曾經(jīng)在北大 AI 公開課上進(jìn)行過自動(dòng)駕駛話題的演講,在談到技術(shù)與成本的話題時(shí),他提到過這樣一種思路:
我們都知道,在真實(shí)世界里跑一億英里談何容易,要耗掉多少油,要消耗多少請(qǐng)司機(jī)的人工費(fèi)用。但在仿真世界里面,只要云計(jì)算的算力足夠,就可以無限測(cè)試,而且這里要求仿真要足夠的真,開發(fā)者對(duì)這種場(chǎng)景是可控的,可以設(shè)計(jì)任意的復(fù)雜的環(huán)境。此外,這種環(huán)境是能夠產(chǎn)生無窮的新場(chǎng)景的,比如模擬建筑、地面、植物、天氣、光照條件等等,這是仿真世界要解決的。
為此,馭勢(shì)科技開發(fā)出了一套無人駕駛?cè)δ芊抡嫦到y(tǒng),可以對(duì)各類傳感器(比如:相機(jī)、激光雷達(dá)、毫米波雷達(dá)、GPS、IMU 等)進(jìn)行仿真模擬,并支持多個(gè)無人駕駛系統(tǒng)同時(shí)接入仿真系統(tǒng),互為障礙物。
正如吳甘沙在演講中提到的那樣,馭勢(shì)科技構(gòu)造了一個(gè)豐富的仿真場(chǎng)景素材庫(kù),覆蓋道路、交通、動(dòng)態(tài)障礙物、路邊環(huán)境、天氣等各個(gè)方面,并能通過這些素材庫(kù)的組合生成更加復(fù)雜的仿真場(chǎng)景。這套無人駕駛?cè)δ芊抡嫦到y(tǒng)提供的各類仿真場(chǎng)景具有非常高的逼真度,為基于仿真器的 AI 訓(xùn)練和學(xué)習(xí)提供了一個(gè)堅(jiān)實(shí)的基礎(chǔ)。
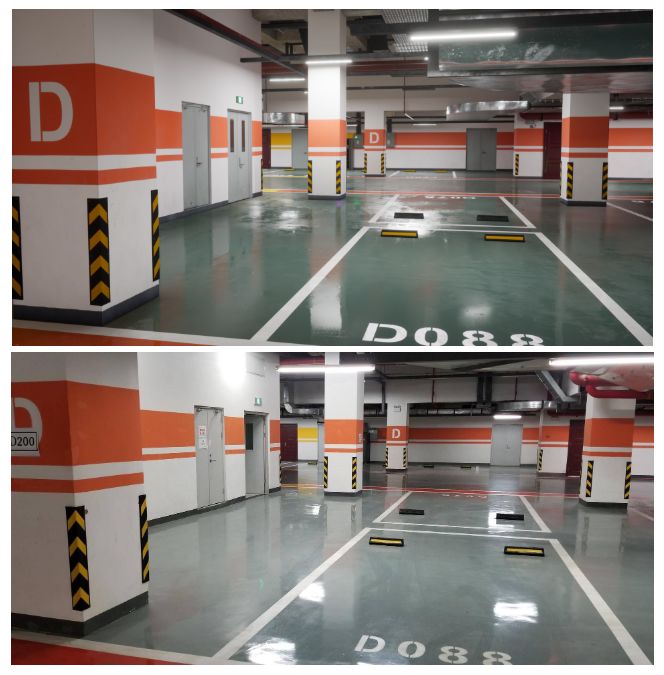
你能識(shí)別出哪張圖是仿真的嗎?
通過仿真環(huán)境內(nèi)進(jìn)行的大規(guī)模測(cè)試,研究人員可以對(duì)馭勢(shì)智能駕駛算法及智能駕駛系統(tǒng)進(jìn)行充分的驗(yàn)證和檢測(cè),從而提高馭勢(shì)智能駕駛系統(tǒng)的質(zhì)量。黃波博士提到:“在智能駕駛車的實(shí)際場(chǎng)景商業(yè)化落地前,我們會(huì)先確保馭勢(shì)智能駕駛系統(tǒng)在仿真環(huán)境中測(cè)試通過落地場(chǎng)景可能涉及的各類工況,從而極大地提高了馭勢(shì)智能駕駛系統(tǒng)的場(chǎng)景適應(yīng)性及安全性,進(jìn)而提高我們項(xiàng)目落地的信心并縮短項(xiàng)目部署的時(shí)間。”
在仿真平臺(tái)上除了能夠驗(yàn)證智能駕駛算法和系統(tǒng),還可以利用仿真場(chǎng)景來進(jìn)行算法 / 系統(tǒng)的學(xué)習(xí)和訓(xùn)練。比如在自主代客泊車(AVP)仿真場(chǎng)景中,訓(xùn)練出來可行駛區(qū)域檢測(cè)網(wǎng)絡(luò)跟用真實(shí)停車場(chǎng)數(shù)據(jù)訓(xùn)練出來的可行駛區(qū)域檢測(cè)網(wǎng)絡(luò)達(dá)到了幾乎一致的檢測(cè)效果。
一輛成熟的無人車不僅要有強(qiáng)大的核心操作系統(tǒng),在硬件裝備上更是不能含糊。
無人車就像是一臺(tái)移動(dòng)的計(jì)算機(jī),所以在不少自動(dòng)駕駛方案里,一個(gè)首要的核心部件就是芯片。
馭勢(shì)科技首席產(chǎn)品官周鑫說:車規(guī)級(jí) AI 芯片有嵌入式 GPU、FPGA、AI ASIC 三個(gè)發(fā)展階段。
根據(jù)他的觀察,從行業(yè)發(fā)展來看,過去兩年主要自動(dòng)駕駛企業(yè)以嵌入式 GPU 搭建主動(dòng)駕駛系統(tǒng),有實(shí)力的企業(yè)比如馭勢(shì)采用了嵌入式 GPU+FPGA 的深度優(yōu)化方案。未來可能會(huì)慢慢過渡到 FPGA+AI ASIC。
這個(gè)過程中,全棧系統(tǒng)開發(fā)和車規(guī) AI 芯片開發(fā)是兩個(gè)行業(yè)層面的工作,財(cái)力雄厚的大公司可以承擔(dān)風(fēng)險(xiǎn)并發(fā)進(jìn)行。但并不意味著當(dāng)下階段自研芯片對(duì)自動(dòng)駕駛公司是必須的。一個(gè)類比就是手機(jī)行業(yè),國(guó)內(nèi)知名手機(jī)品牌在成長(zhǎng)過程說始終保持著自研芯片和外購(gòu)芯片同時(shí)應(yīng)用、并不互相沖突。
周鑫告訴記者:馭勢(shì)科技選擇和半導(dǎo)體行業(yè)合作,也是看到半導(dǎo)體行業(yè)已經(jīng)大幅度增加車規(guī)級(jí) AI 芯片投入開始到了收獲季節(jié),與行業(yè)合作能夠快速獲得行業(yè)成果;同時(shí)馭勢(shì)科技也認(rèn)識(shí)到現(xiàn)有車規(guī)級(jí) AI 芯片必定不能完全滿足快速演進(jìn)的算法,F(xiàn)PGA 研發(fā)成果正好能夠在 AI ASIC 和算法之間完美契合。
同時(shí),他表示:自動(dòng)駕駛技術(shù)行業(yè)前景依賴于快速發(fā)展的高性能、低功耗、可量產(chǎn)、低成本的 AI 芯片的可獲得性。
但是,他認(rèn)為在行業(yè)發(fā)展不同階段,行業(yè)對(duì)芯片依賴不一樣,自動(dòng)駕駛企業(yè)對(duì)自研芯片的必要性也不一樣。當(dāng)下,自動(dòng)駕駛行業(yè)還處在快速研發(fā)階段,正在積極探索各種行業(yè)應(yīng)用、擴(kuò)展無人駕駛應(yīng)用邊界,正在 2B 應(yīng)用落地、2C 應(yīng)用方案驗(yàn)證的階段。
對(duì)應(yīng)的無人駕駛感知(深度學(xué)習(xí))算法和規(guī)劃控制算法都在飛速發(fā)展、不停推陳出新。這個(gè)時(shí)候,無人駕駛初創(chuàng)公司的首要任務(wù)是充分利用現(xiàn)有車規(guī)級(jí) AI 芯片,在新算法和新應(yīng)用之間構(gòu)建橋梁、搭建端到端的完整嵌入式解決方案,快速幫助新算法體系和新應(yīng)用潛力進(jìn)入車輛服務(wù)領(lǐng)域和車輛主機(jī)廠技術(shù)體系,構(gòu)建應(yīng)用閉環(huán)。
作為無人車的“眼睛”,攝像頭與感知系統(tǒng)尤其重要。
目前業(yè)內(nèi)比較普遍方案一般是基于深度學(xué)習(xí)的激光雷達(dá)和視覺的檢測(cè)、識(shí)別方案,馭勢(shì)科技采用基于深度學(xué)習(xí)的檢測(cè)、識(shí)別、跟蹤、多傳感器融合方案。
馭勢(shì)尤其深度投入了攝像頭感知子系統(tǒng)垂直開發(fā),和多家供應(yīng)商在攝像頭 HDR、光學(xué)參數(shù)定制、鏡頭設(shè)計(jì)方面展開深度協(xié)同設(shè)計(jì)優(yōu)化,形成了特有競(jìng)爭(zhēng)力。基于 U-Drive™,馭勢(shì)科技不僅實(shí)現(xiàn)了從傳感模塊到感知子系統(tǒng)到規(guī)劃控制子系統(tǒng)的全棧式垂直優(yōu)化整合、能夠?qū)唧w L4 場(chǎng)景做出最優(yōu)匹配,還能夠基于嵌入式硬件和系統(tǒng)軟件、對(duì)各個(gè)算法模塊做到深度剪裁和深度優(yōu)化、提升可靠性提升算力功耗比。
說起自動(dòng)駕駛,商業(yè)化落地是行業(yè)內(nèi)外近期最關(guān)注的方向。
作為從業(yè)者,馭勢(shì)科技首席架構(gòu)師彭進(jìn)展首先談了談自動(dòng)駕駛領(lǐng)域近些年取得的成果。
根據(jù)他的觀察,自動(dòng)駕駛領(lǐng)域這幾年進(jìn)入快速發(fā)展期,相關(guān)產(chǎn)業(yè)鏈上的核心技術(shù)和設(shè)備已經(jīng)進(jìn)入成熟階段,比如融合多種傳感器的感知和定位技術(shù),高性能高可靠多功能的集成域控制器,增強(qiáng)網(wǎng)絡(luò)和環(huán)境感知的 V2X 技術(shù)等。這些核心技術(shù)和設(shè)備是自動(dòng)駕駛能夠商業(yè)化落地的基礎(chǔ)。
就馭勢(shì)科技來說,目前已經(jīng)有了以上這些核心技術(shù)和設(shè)備的產(chǎn)品級(jí)解決方案,且已經(jīng)應(yīng)用到了非常多的自動(dòng)駕駛應(yīng)用中,包括全自主泊車(AVP)、無人機(jī)場(chǎng)\工廠物流、無人公交和無人微循環(huán)等。
他認(rèn)為,自動(dòng)駕駛的商業(yè)化落地,首要考慮的是應(yīng)用的安全性和可靠性,其次是商業(yè)上的效率和成本接受度。
他進(jìn)一步解釋道:運(yùn)行在高可靠的域控制器上的融合感知系統(tǒng),提供了冗余的環(huán)境感知和多重定位能力,再輔以增強(qiáng)環(huán)境感知的 V2X 技術(shù),讓自動(dòng)駕駛應(yīng)用有了足夠的安全性和可靠性。
彭進(jìn)展提到:自動(dòng)駕駛可以減輕甚至消除對(duì)人類司機(jī)的依賴,能大大提升應(yīng)用運(yùn)行效率。
自動(dòng)駕駛進(jìn)入商業(yè)化應(yīng)用,會(huì)加速各種關(guān)鍵技術(shù)和設(shè)備的成熟和進(jìn)入量產(chǎn)的速度,同時(shí)大幅度降低自動(dòng)駕駛應(yīng)用的整體成本。我們馭勢(shì)科技的自動(dòng)駕駛解決方案已經(jīng)跨過了應(yīng)用落地的門檻,進(jìn)入到了技術(shù)和商業(yè)化落地相互促進(jìn)和加速發(fā)展的階段。
采訪的最后,話題不可避免地又回到“自動(dòng)駕駛的最后一公里”上。
現(xiàn)在已經(jīng)是 2019 年了,離“2020 年全面實(shí)現(xiàn)自動(dòng)駕駛”的說法僅有一年的距離,也有一些人把 2019 年稱為“實(shí)現(xiàn)自動(dòng)駕駛的最后一公里”,當(dāng)然在這期間有不少反對(duì)的聲音,認(rèn)為 2020 年實(shí)現(xiàn)自動(dòng)駕駛并不現(xiàn)實(shí),無人車這種東西還有至少五到十年才能完全實(shí)現(xiàn)。
在彭進(jìn)展看來,自動(dòng)駕駛的商業(yè)化應(yīng)用,需要從兩個(gè)維度來分析,一個(gè)是應(yīng)用的廣度,另一個(gè)是應(yīng)用的深度。上面的兩種聲音實(shí)際上是代表著著從這兩個(gè)不同維度看到的結(jié)果。
從應(yīng)用的廣度來看,不同級(jí)別的自動(dòng)駕駛都開始進(jìn)入實(shí)際的應(yīng)用和運(yùn)營(yíng),包括應(yīng)用于乘用車市場(chǎng)的 L1/L2/L3 的 ADAS 和 L4 級(jí)的 AVP/HZP,以及應(yīng)用于機(jī)場(chǎng)、港口、礦山和園區(qū)的 L4 級(jí)的無人物流車和微循環(huán)車等。比如馭勢(shì)科技已經(jīng)和上汽通用五菱于 2018 年 11 月交付給普通消費(fèi)者業(yè)內(nèi)首款具備無人駕駛 AVP 功能的量產(chǎn)車寶駿 E200,在世界頂級(jí)的國(guó)際機(jī)場(chǎng)運(yùn)行了可全天候工作的無人電動(dòng)物流拖車。“從這個(gè)角度來分析,完全可以說 2019 年已經(jīng)進(jìn)入‘實(shí)現(xiàn)自動(dòng)駕駛的最后一公里’,2020 年將進(jìn)入自動(dòng)駕駛應(yīng)用全面爆發(fā)的新時(shí)代。”他說道。
但從應(yīng)用的深度來講,他認(rèn)為可以在公開道路運(yùn)營(yíng)的 L4 級(jí)自動(dòng)駕駛應(yīng)用,依然面臨著非常多的技術(shù)和商業(yè)化挑戰(zhàn)。比如復(fù)雜場(chǎng)景下的安全決策訓(xùn)練,多重冗余設(shè)備的高成本,以及適合完全自動(dòng)駕駛的道路和網(wǎng)絡(luò)等基礎(chǔ)設(shè)施的建立等,都表明類似于 Robotaxi 這樣的無人車離實(shí)際應(yīng)用還依然遙遠(yuǎn),還需要至少五年以上整個(gè)產(chǎn)業(yè)甚至整個(gè)社會(huì)的加入和努力。
彭進(jìn)展認(rèn)為:L3 以下的自動(dòng)駕駛方案已經(jīng)逐步在各款中高檔量產(chǎn)車型中得到部署,業(yè)界也普遍認(rèn)為 2-3 年后 L3 自動(dòng)駕駛方案可以被逐步量產(chǎn)。同時(shí),特定場(chǎng)景的 L4 在物流、微循環(huán)、短途接駁等各類應(yīng)用場(chǎng)景也已經(jīng)開始試點(diǎn)。
在技術(shù)層面,更大規(guī)模自動(dòng)駕駛解決方案的落地依賴于下面幾個(gè)方面的突破:
- 汽車控制結(jié)構(gòu)上經(jīng)濟(jì)的安全冗余
- 智能駕駛系統(tǒng)基于數(shù)據(jù)積累的自動(dòng)智能增強(qiáng)
- 高性能、低功耗、符合車規(guī)且低成本智能域控制器的量產(chǎn)
- 可以量產(chǎn)的低成本且符合車規(guī)的高冗余自動(dòng)駕駛傳感器配置
- 具有規(guī)范定位接口的高精地圖的商業(yè)化服務(wù)運(yùn)營(yíng)
- 高帶寬、低延時(shí)通訊設(shè)備和基礎(chǔ)設(shè)施的普及
“當(dāng)然,”彭進(jìn)展補(bǔ)充說:“非技術(shù)層面(比如自動(dòng)駕駛相關(guān)政策、法規(guī)、標(biāo)準(zhǔn)、保險(xiǎn)等)的進(jìn)展也對(duì)自動(dòng)駕駛的普及起著至關(guān)重要的作用。”
來源 | AI前線
采訪嘉賓 | 黃波,周鑫,彭進(jìn)展
作者 & 編輯 | Vincent